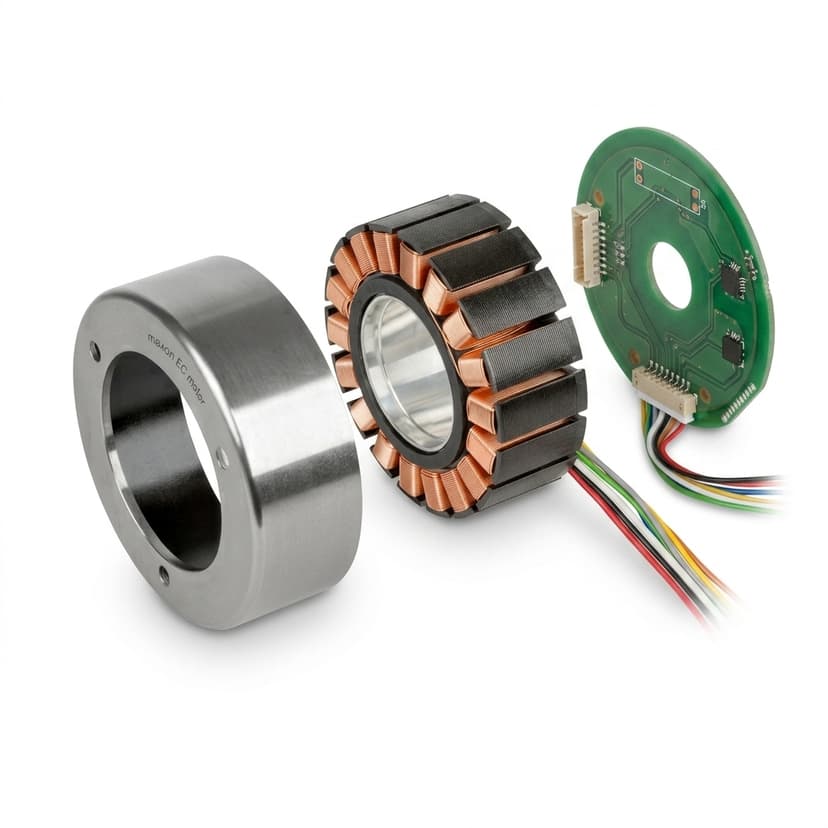
Mechanical fit comes before torque claims
For a frameless kit, stator OD, rotor ID, stack height, retention method, and cable exit direction decide whether the motor can enter the design at all. Treat the CAD review as the first gate, then compare torque-speed data.